
Use the new Pixy2 and a DFRobot ESP32 FireBeetle to create a robot that can find and retrieve items!

Things used in this project
SOFTWARE APPS AND ONLINE SERVICES
· PixyMon
HAND TOOLS AND FABRICATION MACHINES
· Soldering iron (generic)
· 3D Printer (generic)
· Hot glue gun (generic)
Story
Pixy recently came out with their next version of their Pixy Camera, which can recognize objects and track them. DFRobot sent me one, so I decided to create a robot that can grab an item and then bring it back.
Robot Platform
I used a MiniQ robot chassis from DFRobot as the platform that the robot would be built upon. It comes with multiple mounting holes, so I designed a battery riser using Fusion 360 that attaches to a set of holes. Then I mounted the gripper to the front.

Pixy Camera Setup
The makers of the Pixy Camera provide a software called PixyMon, which shows what the camera "sees" and lets users adjust parameters, set interfaces, and create color codes. I downloaded and installed PixyMon from their website here. Then I connected the Pixy2 to my PC via USB and went to the File menu and selected Configure.
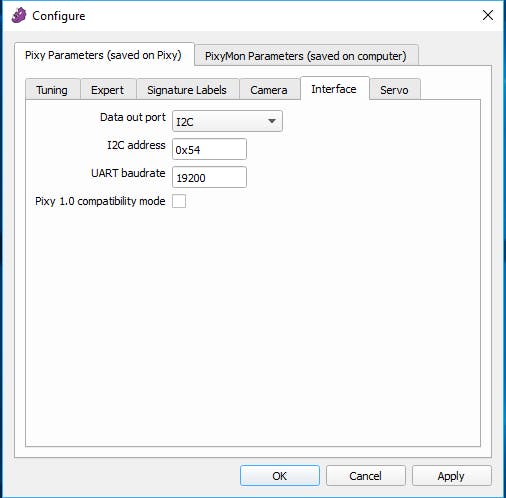
First, I set the interface to I2C, as I will be using a non-Arduino board.
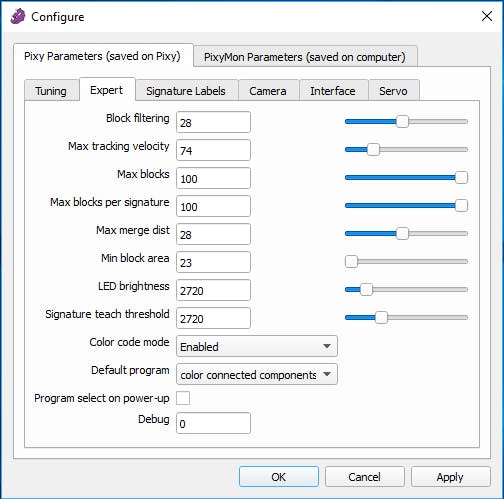
Next, I tuned some miscellaneous settings in the expert menu, as seen in the image.
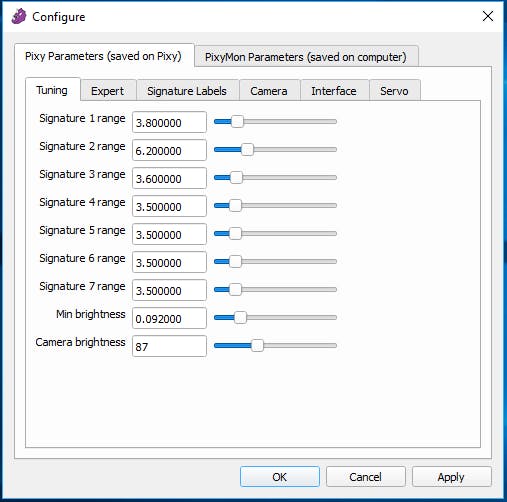
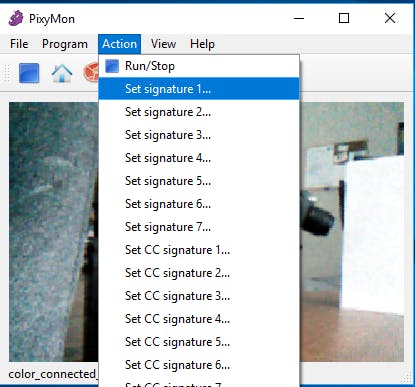
Finally, I got out the block I wanted to use and clicked "Set signature 1" under the Action menu. This sets what the Pixy looks for.
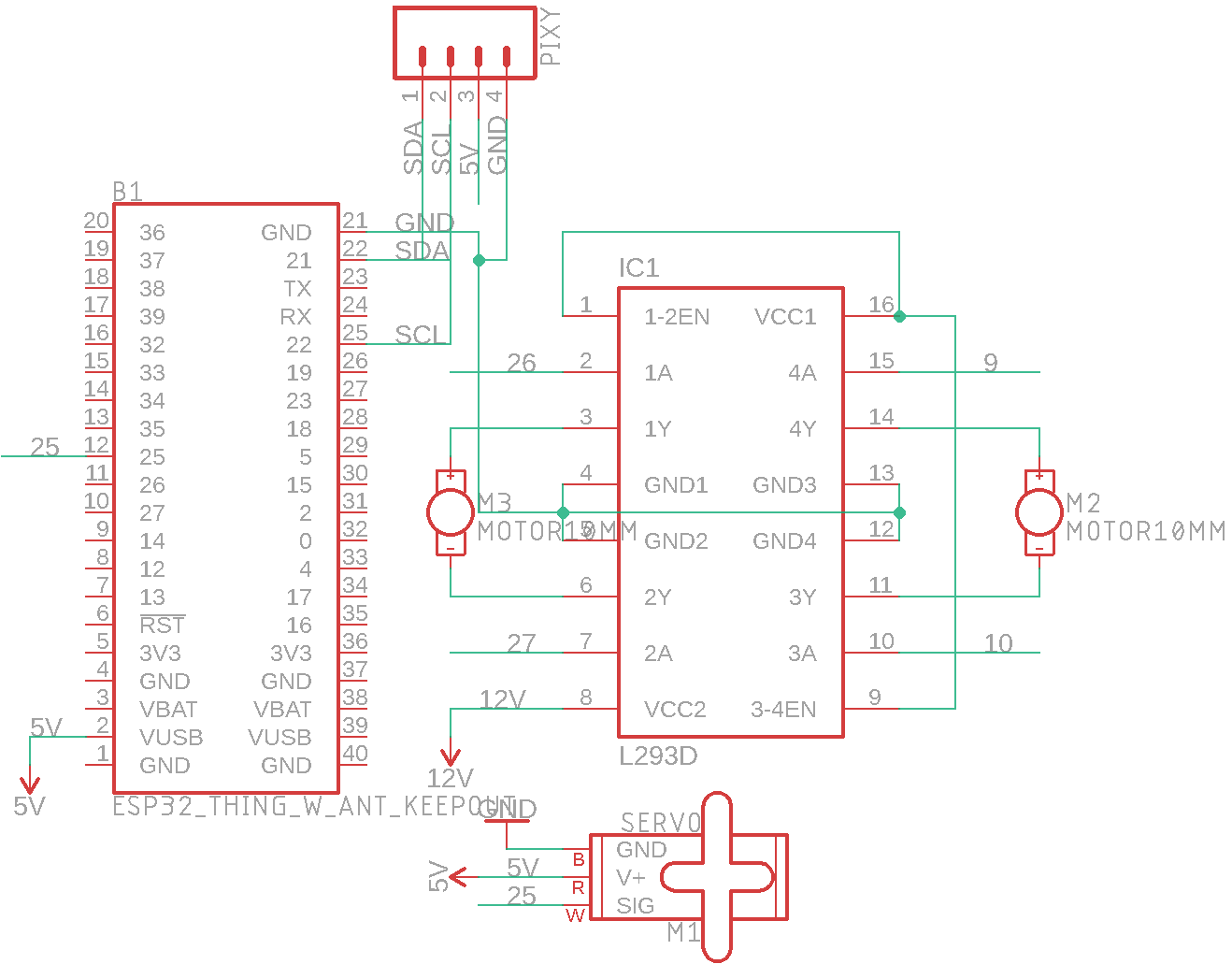
Wiring
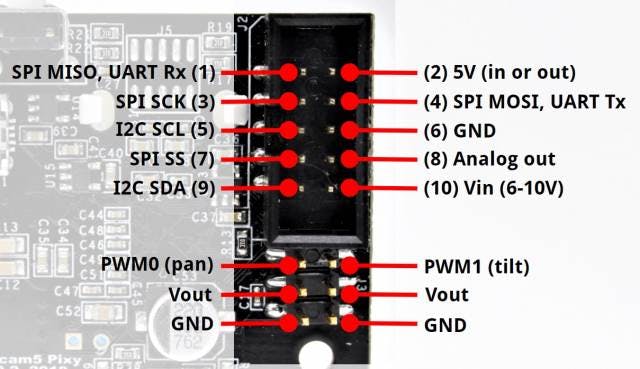
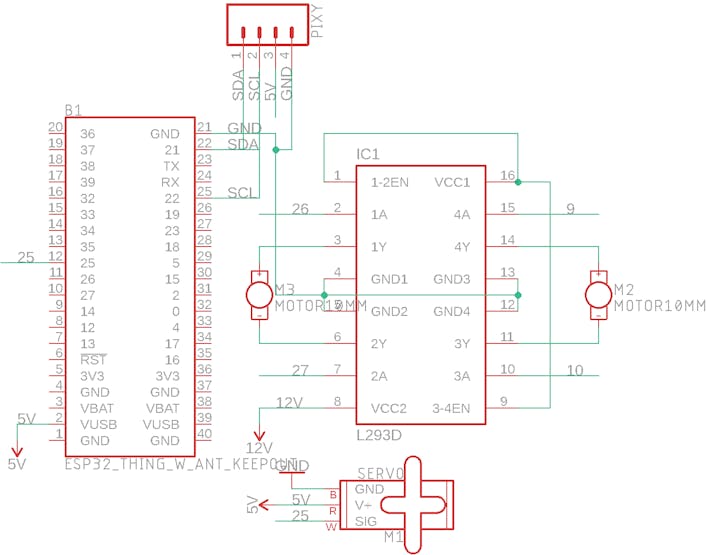
Since I setup the Pixy to use the I2C mode, only 4 wires are needed to connect it to the ESP32 FireBeetle. Just connect SDA, SCL, 5V, and GND.
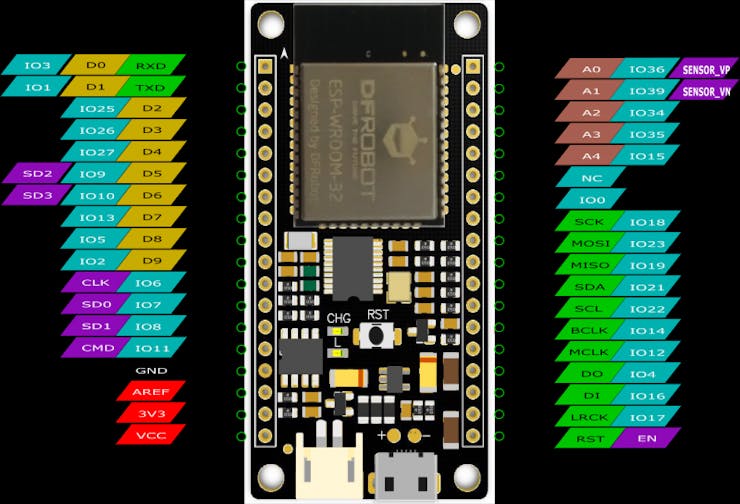
Then I wired up the L293D dual H-bridge DC motor driver to pins IO26, IO27, IO9, and IO10, along with power and output, as seen in this image.
Creating the Program
The program "flow" goes as follows:
· Find target block
· Get width and position
· Adjust robot position based on where the block is
· Move forward until it gets close enough
· Grab object
· Reverse backwards
· Release object
Using the Robot
I first put up a piece of white paper for the background to prevent other objects from being accidentally detected. Then, I reset the ESP32 and watched it drive towards the object, grab it, and then return it, as seen in the video.
Custom parts and enclosures
Battery Platform
https://sketchfab.com/3d-models/battery-platform-nngheyczsp-5d70a477f3be45f981e8c667e7d5982f
Schematics
Board Schematic
ESP32 Code
#include <ESP32_Servo.h>
#include <Pixy2I2C.h>
#include "esp32-hal-ledc.h"
Pixy2I2C pixy;
#define CENTER 100
#define DEADZONE 10
int motor_pins[] = {26,27,9,10};
Servo gripper;
int servo_pin = 25;
int pos;
int state = 1;
const int freq = 490, resolution = 8;
void setup()
{
Serial.begin(115200);
Serial.print("Starting...\n");
pixy.init();
gripper.attach(servo_pin);
for(int i=0;i<4;i++){
ledcAttachPin(motor_pins[i],i+2);
ledcSetup(i+2,freq,resolution);
}
set_gripper(0);
delay(2000);
set_gripper(1);
}
void loop()
{
int i;
// grab blocks!
pixy.ccc.getBlocks();
// If there are detect blocks, print them!
if (pixy.ccc.numBlocks)
{
//Serial.print("Detected ");
//Serial.println(pixy.ccc.numBlocks);
for (i=0; i<pixy.ccc.numBlocks; i++)
{
/*Serial.print(pixy.ccc.blocks[i].m_width);
Serial.print(" ");
Serial.println(pixy.ccc.blocks[i].m_height);
/*Serial.print(" block ");*/
//Serial.print(i);
//Serial.print(": ");
//pixy.ccc.blocks[i].print();
if(pixy.ccc.blocks[i].m_width > 220){
set_gripper(2);
move(0);
state = 0;
move(4);
delay(3000);
move(0);
set_gripper(1);
while(1);
}
Serial.print(pixy.ccc.blocks[i].m_x);
Serial.print(",");
Serial.println(pixy.ccc.blocks[i].m_width);
}
if(state==1){
if(pixy.ccc.blocks[i].m_x >= CENTER-DEADZONE || pixy.ccc.blocks[i].m_x <= CENTER+DEADZONE){
move(3);
delay(2);
move(0);
}
else if(pixy.ccc.blocks[i].m_x > CENTER){
//while(pixy.ccc.blocks[i].m_x > CENTER){
move(1);
delay(2);
move(0);
//}
}
else if(pixy.ccc.blocks[i].m_x < CENTER){
//while(pixy.ccc.blocks[i].m_x < CENTER){
move(2);
delay(2);
move(0);
//}
}
}
}
if(Serial.available()>0){
pos = Serial.parseInt();
Serial.println(pos);
if(pos != 0){
gripper.write(pos);
}
}
}
void move(int dir){
switch(dir){
case 0: //stop
ledcWrite(2, 0);
ledcWrite(3, 0);
ledcWrite(4, 0);
ledcWrite(5, 0);
break;
case 1: //left
ledcWrite(2, 120);
ledcWrite(3, 0);
ledcWrite(4, 120);
ledcWrite(5, 0);
break;
case 2: //right
ledcWrite(2, 0);
ledcWrite(3, 120);
ledcWrite(4, 0);
ledcWrite(5, 120);
break;
case 3: //forward
ledcWrite(2, 0);
ledcWrite(3, 120);
ledcWrite(4, 120);
ledcWrite(5, 0);
break;
case 4: //back
ledcWrite(2, 120);
ledcWrite(3, 0);
ledcWrite(4, 0);
ledcWrite(5, 120);
break;
}
}
void set_gripper(int state){
switch(state){
case 0:
gripper.write(180);//closed
break;
case 1:
gripper.write(0);//open
break;
case 2:
gripper.write(60);//grip
break;
}
}The article was first published in Hackster, January 8, 2019
cr: https://www.hackster.io/gatoninja236/making-a-robot-play-fetch-657ebc
author: Arduino “having11” Guy









